| |
|
|
| |
InnovateFPGA Design Highlight
From AI at the Edge to Autonomous Machine
AI solves a variety of problems in life, such as gaining insights into diagnostics and treatment process with the support of machine learning, enabling robots and other autonomous machines to perceive, navigate and execute complex tasks. See how FPGA brings AI into construction in 2019 InnovateFPGA Contest!
 |
An unprecedented FPGA design festival co-organized by Terasic, Intel®, and sponsored by 2019 FPT Conference, DigiKey, ISSI, 2019 InnovateFPGA Global Design Contest has now reached the last month of regional final round! From September 10th, we will introduce innovative designs to global FPGA communities.
Sign up as a community member and see participants from around the world compete to invent the future of Artificial Intelligence in smart devices at the edge powered by a Intel® Cyclone® V SoC or Intel® Cyclone® V FPGA using the Terasic DE10-Nano Kit or the Intel® Distribution of OpenVINO™ toolkit Starter Kit!
|
|
|
| |
|
|
|
PR002
Picking Robot
|
|
| |
|
The team from Chongqing University designed a badminton intelligent picking robot. The robot uses the laser scanning sensor and camera data fusion to realize the rapid positioning and accurate identification of the on-site badminton. On this basis, the SoC sends the badminton information to the action execution part according to the strategy of the nearest distance, realizing the automatic ball-picking and collecting, and automatic homing function.
Design concept: Using FPGA's powerful parallel computing capability to quickly process image information, enabling the robot to obtain badminton position information in real time, and achieving buckling-free picking.
|
|
| |
| |
|
|
|
PR016
The Robot Grasping System Based on Deep Learning
|
|
|
| |
|
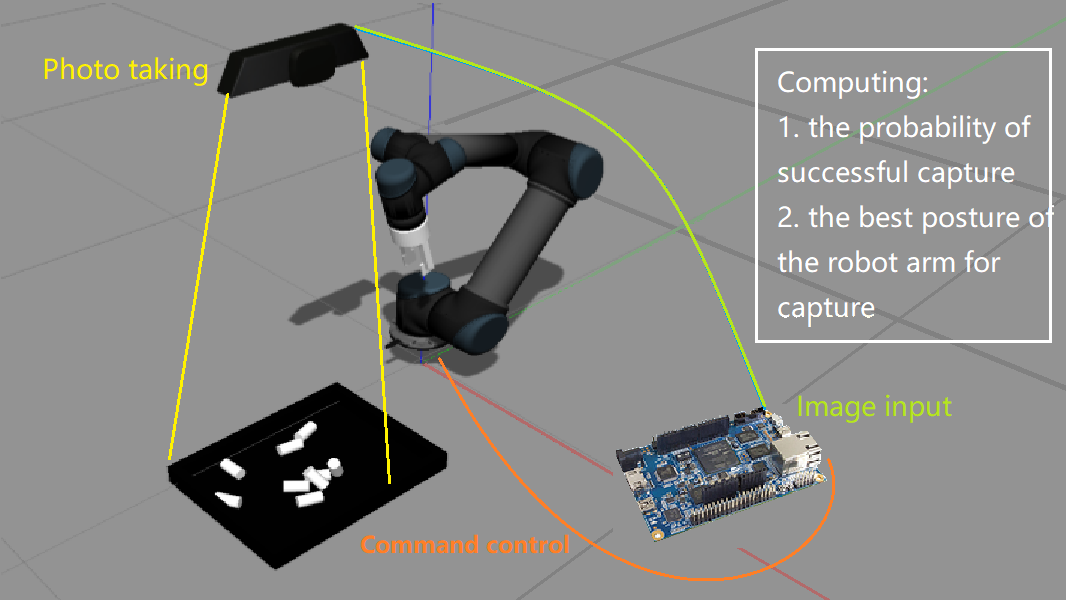
The team from Tsinghua University designed a Robot grasping system based on deep learning.
The overall system includes a 3D camera module, a DE-10 Nano Board and a 6-axis robot arm. The project has two functions: Grasping decision system and grasping discrimination system. The grabbing discrimination system uses the structure of neural network to distinguish the success rate of grabbing according to the image information, and the grabbing decision system uses heuristic search algorithm to decide the grabbing position according to the given discriminant system function.
Design concept: This system can face a variety of complex working environments, such as programming process of the robot is very complicated, and the production line has a long build cycle. The target users of this project are small and medium-sized enterprises that need to realize flexible deployment of industrial robots.
|
|
| |
| |
|
|
| |
PR014
SLAM Navigation, Human-computer Interaction Robot
|
|
|

|
|
The team from Hubei University designed SLAM navigation, human-computer interaction robot.
The main board of this product is DE1-SoC, and the FPGA is connected to the camera and audio-microphone through USB cable for image and voice acceleration processing. The two encoders are connected to the main board by USB cable via the STM32 driver board. The IMU module and lidar are also connected to the main board by USB cable, which realizes ROS odometer data feedback, slam navigation, efficient path planning, dynamic obstacle avoidance, multi-target patrol, voice, interaction and other functions. In addition, the robot can be remotely controlled by mobile phone through WiFi.
Design concept: The currently planned robot is a home service robot. The functions of the robot include sweeping the floor, guarding the house, and playing with children. the floor, watching the house, and playing with children.
|
|
| |
| |
EM040
Human Gait Phase Detection Using Convolution Neural Network-based Prediction Engine
|
|
|
|
|
This project aims to develop a prediction engine for human gait phase detection using Convolution Neural Networks (CNN) implemented on Intel Cyclone V FGPA SoC.
The application requires real-time data processing on a wearable device, and prediction engine developed on the DE10-Nano. Early prediction of the risk of fall helps patients who need assistive devices in their walking.
|
|
| |
| |
|
|
| |
AS029
AuT: Intelligent System to Assist the Treatment of Children with Autism |
|
| |
|

|
|
The project is an intelligent robotic system that assists therapists during their treatment of children with autism. It uses the sensors to capture children's movements, conduct data analysis and feedback to observe the development of children with autism during the treatment.
The project utilizes “parallelism” – one of the advantage of FPGA - to carry out rapid detection of human face. OpenVINO Starter Kit is used for deep learning and CNN applications in the project. With OpenVINO Starter Kit, the intelligent robotic system can process images in a more efficient way and better perform the emotional recognition task.
|
|
|
| |
|
|
|
